
Summary
- Intact.Simulation can perform simulation directly from any assembly of representations, including VDB-implicits, without meshing or preprocessing
- This article explains how to set up a simulation study for assemblies with VDB-implicit geometries
- Users can conduct trade-off studies within a few minutes, at a push of a button, to select the lattice that is best suited for the intended function
What is VDB-implicit?
VDB (Volumetric Dynamic B+ tree) is a sparse data structure that is both fast and has a low memory footprint. The VDB data structure can be used to define and manipulate implicit functions very efficiently (VDB-implicits). A key characteristic of VDB-implicits is that it only allocates memory sparsely, e.g. around the boundary of implicit function. Thus, it only incurs a memory footprint that scales with the size of the actual sparse boundary. OpenVDB also has a suite of tools for the efficient manipulation of VDB data structures, as well as for performing operations related to implicit modeling such as blending, filtering, or rendering. Widely used CAD/CAE and generative design software such as nTop, Blender, Houdini, Rhino, Modo and Synera provide support and/or have plugins for VDB-implicits.
Different types of lattices
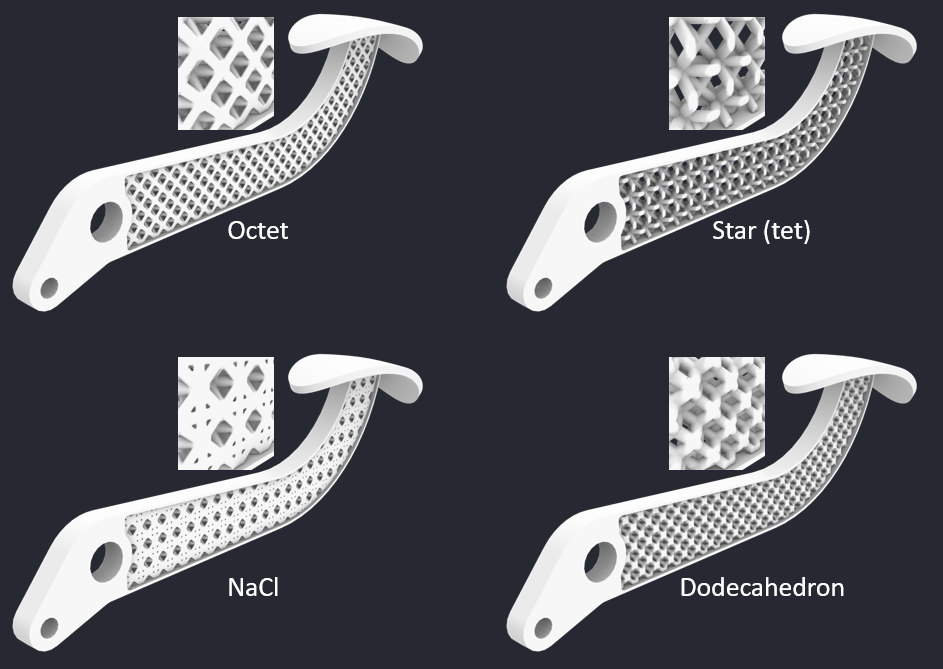
Lattice and infill structures are commonly used by designers for producing lightweight and high-efficiency parts. Commonly used design software for generating different types of lattices give the user a variety of options (e.g., cellular structures, honeycombs, foams, etc.). This prompts the question, “How do I, as a user, select the type of lattice that works best for my application?” For example, the picture below shows four different types of implicit lattices: the octet, star-tetrahedral, NaCl (body-centered cubic), and dodecahedron (designed using the Grasshopper plugins Crystallon and Dendro). In this article, we discuss how Intact.Simulation can streamline the process of selecting the best lattices, using FEA simulation-based metrics.
Why is comparing lattice performance a challenge for conventional simulation software?
Conventional software relies on meshing— the process of producing a boundary-conforming mesh from a geometry. Meshing is a relatively fast operation for simple CAD geometries (e.g., simple brackets), but it is a tedious operation for complicated geometries, such as latticed parts.
- Meshing latticed parts might take hours, if not days, depending on the geometric complexity
- The mesh must adapt to the smallest features, and the user typically has very little control over the number of FEA nodes in the mesh. A typical mesh could include 10s of millions of nodes or more, making simulation on a desktop or laptop expensive or even infeasible.
- The widely available meshing tools do not work well with implicit geometries including VDB-implicits.
Intact.Simulation comes to the rescue
Intact’s Immersed Method of Moments (IMM) is a geometry agnostic meshfree technology, deeply embedded in Intact.Simulation. It works with virtually any type of geometric representation, including assemblies of B-reps, surface meshes, voxels, g-code, scan data, and of course, implicit geometries.
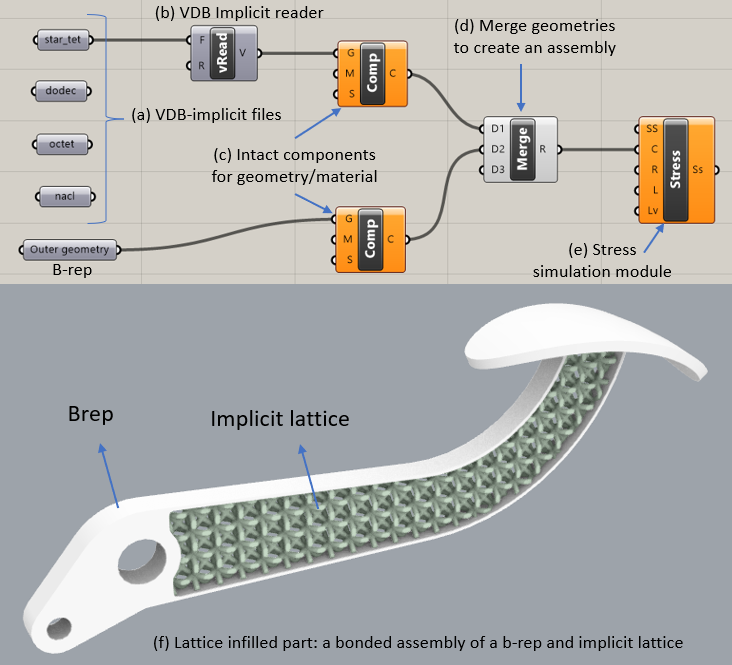
The picture below shows how Intact.Simulation for Rhino Grasshopper allows plug-and-play of different lattice types.
- The geometry is described as a bonded assembly of a B-rep (the outer geometry) and a VDB-implicit lattice as shown in (f) below.
- These files (a) can be loaded into Intact.Simulation for Rhino Grasshopper using the implicit geometry reader (b). Intact’s components for geometry/material work are geometry agnostic—they work with any geometry, including implicits, B-reps, or surface meshes.
- The merge component (b) creates the bonded assembly, which can be sent to the stress simulation module (e) for FEA.
- As the picture below demonstrates, the user can plug-and-play with different lattice geometries by simply connecting the appropriate lattice geometry in (a) to the implicit reader in (b), and the rest of the workflow is automated.
Trade-off studies
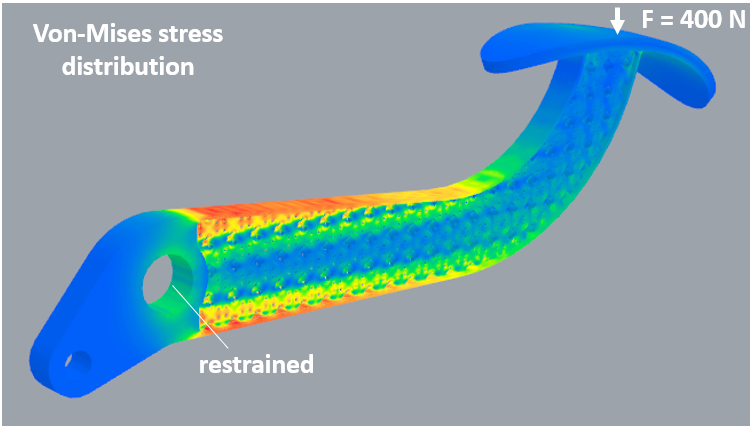
A great advantage of Intact’s rapid plug-and-play simulation is that users can perform trade-off studies. For example, users can quickly perform simulations on different kinds of lattices. One such trade study is discussed here. As shown in the picture below, a force of 400 N is applied on one end while the cylindrical region on the other end is restrained. The objective is to compare and contrast the different kinds of lattices.
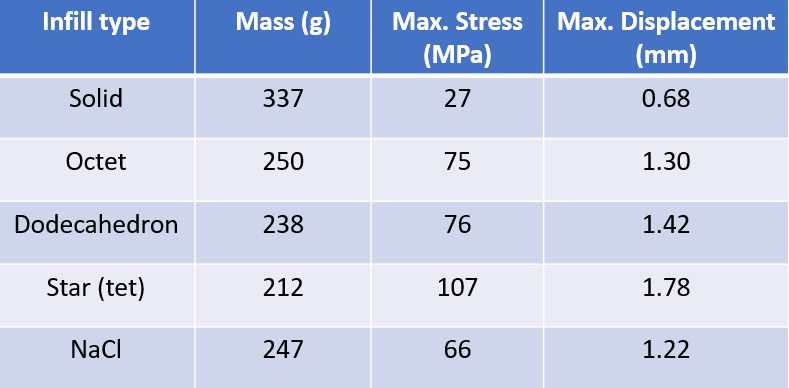
The table below shows the results obtained (mass, max. stress, and max. displacement) for different lattices. The total simulation time for all five cases below took approximately 10 minutes on a laptop!
- The solid infill has the highest mass (duh!) and max stress and max displacement of 27 MPa and 0.68 mm.
- As we can see from the table below, the NaCl lattice (body-centered cubic) has the least max. stress (66 MPa) amongst the lattice structures
- The star-tet lattice is the lightest weighing at 212g, but it also has the highest max. stress and displacement.
- Therefore, if the design requirement states that
- the part must not exceed 240 g, and the max stress should not exceed 80 MPa, the dodecahedron lattice would be the best option
- the part must not exceed 250 g, and the max stress must not exceed 70 MPa, the NaCl lattice would be the one to choose from
Conclusion
In conclusion, this article demonstrates how Intact.Simulation for Rhino Grasshopper can be used to perform trade-off studies on the different effects of implicit lattices in a short amount of time. In other words Intact.Simulation’s automated FEA technology allows users to get creative with designing lattice structures and rapidly verify their parts.
Contact US
Please contact info@intact-solutions.com if you are interested in simulating implicit geometries or in Intact.Simulation with Grasshopper.